
A fleet of miniature autonomous cars has shown how driverless cars improve traffic flow by at least 35% when programmed to work together.
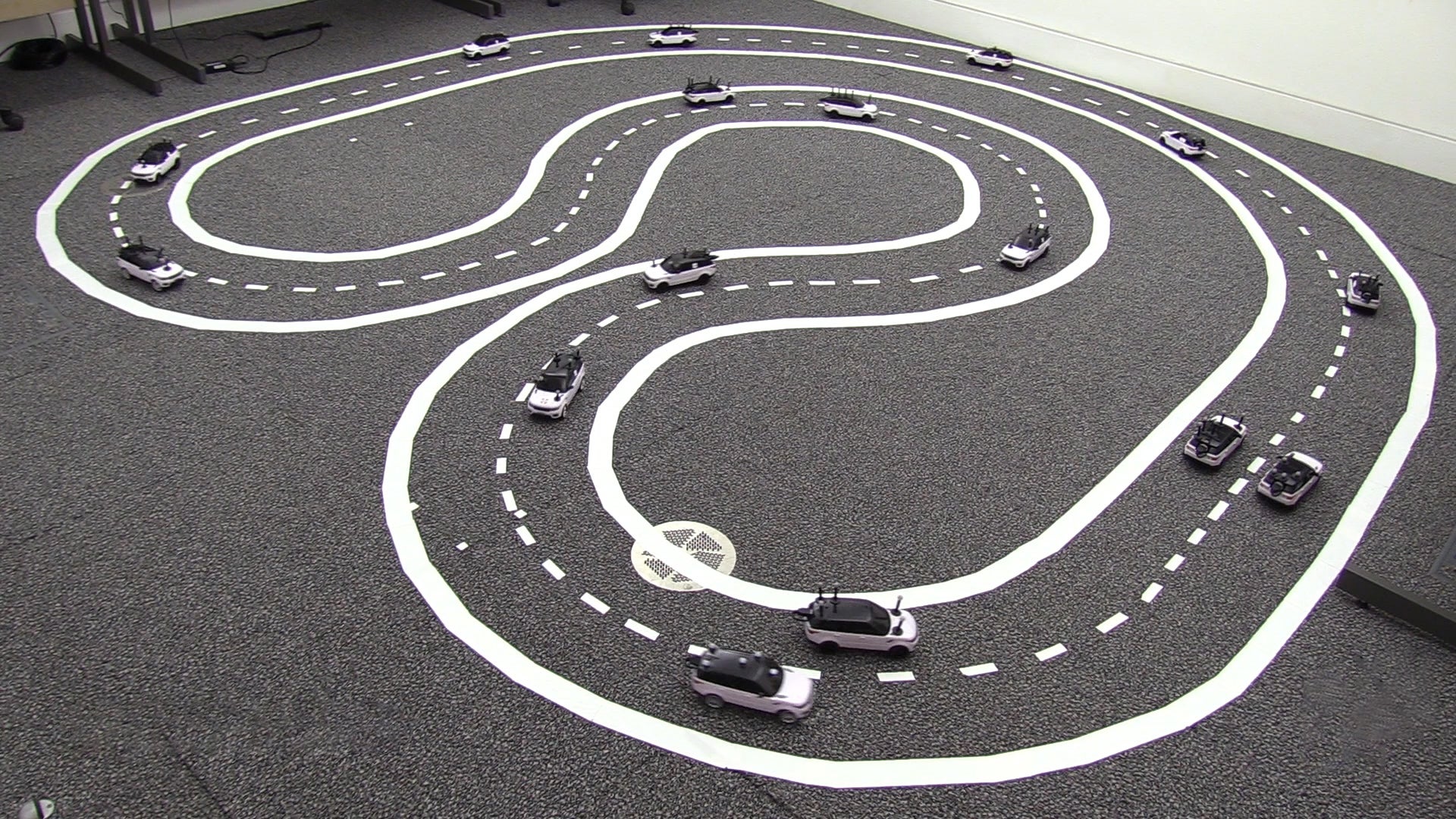
Researchers at the University of Cambridge, UK, tested how 16 miniature robotic cars driving around a two-lane track reacted when one of the cars on the inner lane stopped.
Go deeper with GlobalData

Access deeper industry intelligence
Experience unmatched clarity with a single platform that combines unique data, AI, and human expertise.
When the cars were in cooperative mode, they alerted the rest of the cars to slow down as it neared the immobile car, allowing the inner lane cars to quickly pass it.
However, when they were not driving cooperatively, traffic built up as cars had to stop and wait for a safe moment to overtake the stopped car.
“Autonomous cars could fix a lot of different problems associated with driving in cities, but there needs to be a way for them to work together,” said co-author of the study Michael He, an undergraduate student at St John’s College who designed the lane-changing algorithms for the experiment.
The algorithms determined aspects including when to change lane, whether changing lanes would help it move through traffic more quickly and also added safety measures to prevent crashes.
Tests showed that cooperative driving improved traffic flow by 35% compared to non-cooperative driving. This improvement rose to 45% when compared to aggressive driving.
Driverless cars improve traffic flow, so long as they can communicate
The benefits of driverless cars, which are being developed by company’s such as Waymo and General Motors, often focus on two areas: improving road safety and reducing traffic. However, manufacturers will need to ensure their software can communicate with different makes of cars to reap these benefits, the researchers warn.
“If different automotive manufacturers are all developing their own autonomous cars with their own software, those cars all need to communicate with each other effectively,” said co-author Nicholas Hyldmar, an undergraduate student at Downing College, who designed much of the hardware for the experiment.
The researchers also tested the fleet with a single car controlled by a human using a joystick driving in an aggressive manner. The autonomous models were able to give way to avoid the aggressive human driver, suggesting the potential safety benefits of connected driverless cars even when humans are on the road.
The benefits of driverless cars are often demonstrated via digital tests. Real world tests often involve scale models that are too large or costly to carry out in an indoor environment.
The University of Cambridge students conducted their experiment using 1:24 scale models with realistic steering systems and motion capture sensors. They used the inexpensive Raspberry Pi computer to let the cars communicate via Wi-Fi.
“Our design allows for a wide range of practical, low-cost experiments to be carried out on autonomous cars,” added Prorok. “For autonomous cars to be safely used on real roads, we need to know how they will interact with each other to improve safety and traffic flow.”
The results were presented yesterday at the International Conference on Robotics and Automation in Montréal.
The study follows recent research that showed ride-hailing firms such as Uber and Lyft are adding to congestion in San Francisco, despite claims they were reducing traffic. Both Uber and Lyft developing driverless cars.
Read more: Which company has won the public’s trust in driverless cars?




