
An underwater robot is being developed to explore abandoned mines and determine whether it is economically viable to reopen them.
Currently under development by a group of researchers across Europe under the project name UNEXMIN, including representatives from the Centre for Automation and Robotics in Spain, the robot is designed to assist with resource shortages in the continent.

Access deeper industry intelligence
Experience unmatched clarity with a single platform that combines unique data, AI, and human expertise.
Much of Europe has historically hosted mines, but has seen many closed due to lower resource extraction costs in other parts of the world. This means that the continent is now largely dependent on imports of raw materials.
However, advances in mining technologies means that many of the now abandoned mines – of which there are around 30,000 across the continent – are now viable to reopen, allowing the continent to reduce its reliance on raw material imports.
But there is an issue: many of these mines are now flooded, and information about their mineralogical composition is largely out of date.
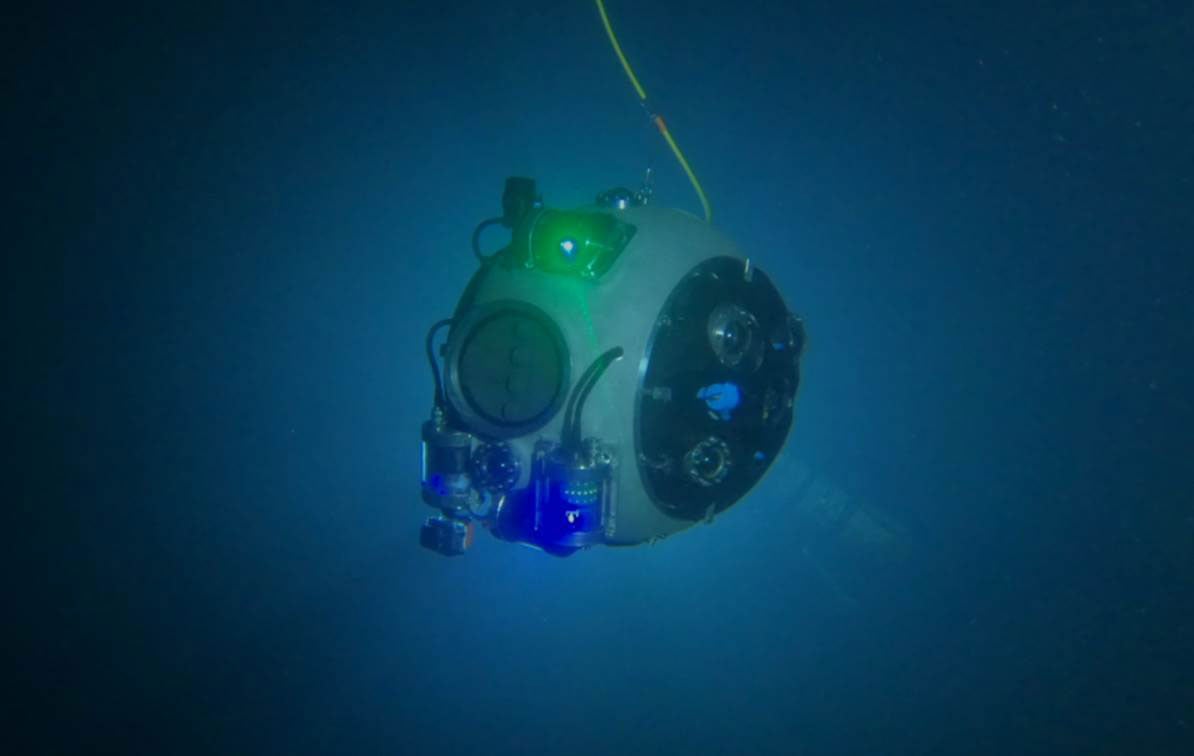
This robot, dubbed the UX-1a Robotic Explorer, has been designed to resolve the problem.

The underwater robot designed to explore abandoned mines
The UX-1a is capable of autonomously navigating the complex tunnels of abandoned mines, creating a map of each mine using five digital cameras and rotating laser line projectors, as well as a multispectral camera, water sampling system and gamma radiation monitor.
The robot is also designed to minimise any risk of tunnel collapse as it moves through the abandoned mines thanks to a spherical shape.
The resulting data will provide details not only of each mine’s layout, but its geological makeup, potential resources and any risks associated with resuming mining.
Using this data, it will be possible to determine whether a mine is a suitable candidate to resume resource extraction activities.
“From a technological point of view, this project is facing three main challenges: the first one is to build a robot which is able to work in real underwater environment up to 500 meters,” said Claudio Rossi, a researcher at the Centre for Automation and Robotics, a joint centre run by the Universidad Politécnica de Madrid and El Consejo Superior de Investigaciones Científicas.
“The second challenge is to achieve autonomous navigation in unknown environment, since there is no communication with the outside, and finally, the third challenge is to develop ad-hoc scientific instrumentation to assess the geophysical information.”
The prototype robot has already undergone tests in mines in Finland, Slovenia and Portugal.
Read more: Volvo and Skanska begin tests at prototype all-electric mining site




